

1. ņä£ļĪĀ
ņĄ£ĻĘ╝ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņØś Ļ░£ļ░£ļĪ£ ņØĖĒĢ┤ņä£ ņĢĪņČöņŚÉņØ┤Ēä░ņÖĆ ņä╝ņä£ņŚÉ ļīĆĒĢ£ Ļ┤Ćņŗ¼ņØ┤ ņ”ØĻ░ĆĒĢśĻ│Ā ņ׳ļŗż. ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņŚÉ ņé¼ņÜ®ļÉśļŖö ĒīīĒŖĖļōżņØĆ Ēü¼ĻĖ░Ļ░Ć ņ×æņ£╝ļ®┤ņä£ ņ£ĀņŚ░ĒĢ┤ņĢ╝ ĒĢ£ļŗż. ņØ┤ļ¤¼ĒĢ£ ĒŖ╣ņ¦ĢņØä ļ¦īņĪ▒ĒĢśļŖö ļ¼╝ņ¦łļĪ£ņŹ© Ionic polymer-metal composite (IPMC) ņØ┤ņś© Ļ│ĀļČäņ×É-ĻĖłņåŹ ļ│ĄĒĢ®ņ▓┤ (IPMC)ļŖö ņĄ£ĻĘ╝ 20ļģäĻ░ä ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņÖĆ ļŗżņ¢æĒĢ£ ņé░ņŚģļČäņĢ╝ņŚÉņä£ ņé¼ņÜ®ļÉśļŖö ņä╝ņä£, ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ ņŚ░ĻĄ¼Ļ░Ć ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż.1ŌĆō5) ņĀäĻĖ░ĒÖ£ņä▒ņżæĒĢ®ņ▓┤ ņżæ ĒĢśļéśņØĖ IPMC ļŖö ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņŚÉ ņé¼ņÜ®ĒĢśĻĖ░ ņÜ®ņØ┤ĒĢ£ ņןņĀÉņØä Ļ░¢Ļ│Ā ņ׳ļŗż. ņןņĀÉļōżļĪ£ļŖö Ļ░Ćļ▓╝ņÜ┤ ļ¼┤Ļ▓ī, ļČĆļō£ļ¤¼ņøĆ, ņĀäĻĖ░ ņŚÉļäłņ¦ĆņØś ĒÜ©ņ£©ņĀüņØĖ ļ¼╝ļ”¼ņĀü ņŚÉļäłņ¦ĆļĪ£ņØś ļ│ĆĒÖś, ļé«ņØĆ ĒÖ£ņä▒ ņĀäņĢĢņŚÉņä£(1Ōł╝3V) ļéśĒāĆļéśļŖö Ēü░ ļ▓żļö® ņŖżĒŖĖļĀłņØĖ, ļé«ņØĆ ņĀäļĀź ņåīļ╣ä, ļ╣ĀļźĖ ļ░śņØæ, ļ¼╝ļ”¼ņĀüņØ┤ļéś ĻĖ░Ļ│äņĀüņ£╝ļĪ£ ļåÆņØĆ ļé┤ņä▒Ļ│╝ ņĢłņĀĢņä▒, ņåīĒśĢĒÖöņØś Ļ░äļŗ©ĒĢ© ļō▒ņØ┤ ņ׳ļŗż.6) ņāüĻĖ░ĒĢ£ ĒŖ╣ņ¦ĢļōżļĪ£ ņØĖĒĢ┤ņä£ IPMCļŖö ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņŚÉņä£ ņåīĒöäĒŖĖ ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ ņØ┤ņÜ®ļÉśņŚłĻ│Ā ĒŖ╣Ē׳ ļ¦łņØ┤Ēü¼ļĪ£ ļĪ£ļ┤ćĻ│╝ ĒĢ┤ņĀĆ ļĪ£ļ┤ćĻ│╝ Ļ░ÖņØĆ Ļ││ņŚÉ ņé¼ņÜ®ļÉśņŚłļŗż.3,7) IPMCļŖö ļśÉĒĢ£ ļ¼╝ļ”¼ņĀüņØĖ ņŚÉļäłņ¦Ćļź╝ ņĀäĻĖ░ņĀüņØĖ ņŚÉļäłņ¦ĆļĪ£ ļ░öĻ┐Ć ņłś ņ׳ļŖö ĒŖ╣ņä▒ņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖöļŹ░ ņØ┤ļ¤░ ĒŖ╣ņä▒ņØĆ ņä╝ņä£ ļČäņĢ╝ņŚÉņä£ ņŖżņŖżļĪ£ Ļ░Éņ¦ĆĒĢśļŖö ĒŖ╣ņä▒ņ£╝ļĪ£ ņŻ╝ļ¬®ņØä ļ░øĻ│Ā ņ׳ļŗż.8)
IPMCņØś ņ£ĀņÜ®ĒĢ£ ĒŖ╣ņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ ņØ┤ļ»Ė ļ¦ÄņØĆ ņŚ░ĻĄ¼ņ×ÉļōżņØ┤ ļŗżņ¢æĒĢ£ ņØæņÜ®ļ░®ņĢłņØä ņĀ£ņŗ£ĒĢśņśĆļŗż. Kamamichi et. al ņØĆ IPMC ņĢĪņČöņŚÉņØ┤Ēä░ņÖĆ ņä╝ņä£ļź╝ ļ▒ĆņØś ĒśĢĒā£ļź╝ Ļ░Ćņ¦ä ņłśņśü ļĪ£ļ┤ćņ£╝ļĪ£ ņĀ£ņĢłĒĢśņśĆļŗż.9) Mojarred et. alņØĆ IPMCļź╝ ņāØļ¼╝ļ¬©ļ░® ĒĢ┤ņĀĆ ļĪ£ļ┤ćņØś ņČöņ¦äņŗ£ņŖżĒģ£ņŚÉņä£ ņØ┤ņÜ®ļÉśļŖö ĒöäļĪ£ĒÄĀļ¤¼ļĪ£ ņé¼ņÜ®ĒĢśņśĆļŗż.10) 2007ļģäņŚÉļŖö Guo et. alņØĆ ĒĢ┤Ēīīļ”¼ņÖĆ Ļ░ÖņØĆ ĒĢ┤ņĀĆ ļĪ£ļ┤ćņØä ļ¦īļō£ļŖöļŹ░ IPMC ņĢĪņČöņŚÉņØ┤Ēä░ļź╝ ņé¼ņÜ®ĒĢśņśĆļŗż.11) Krishen et. alņØĆ ņÜ░ņŻ╝ ņ×äļ¼┤ņŚÉņä£ņØś IPMC ņ¢┤Ēöīļ”¼ņ╝ĆņØ┤ņģśņØä ņĀ£ņĢłĒĢśņśĆļŗż.12) 2015ļģä Shen et. alņØĆ IPMC ņä╝ņä£ļź╝ ņé¼ņÜ®ĒĢśņŚ¼ ĒĢ┤ņĀĆ ņ░©ļ¤ēņØä ņĀ£ņ×æĒĢśņśĆļŗż.13) Palmre et. alņØĆ ņāØļ¼╝ņŚÉņä£ ņśüĻ░ÉņØä ļ░øņØĆ IPMC ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ ĻĄ¼ļČĆļ”¼Ļ│Ā Ē£śļŖö Ļ▓āņØ┤ Ļ░ĆļŖźĒĢ£ ņ¦ĆļŖÉļ¤¼ļ»Ėļź╝ ļ¦īļōżņŚłļŗż.7) ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņŚÉņä£ ņåīĒöäĒŖĖ ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ņŹ©ņØś ņō░ņ×äņāł ļ¦ÉĻ│ĀļÅä IPMCļŖö Ļ┤æĒĢÖņŗ£ņŖżĒģ£ņŚÉ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ļŖöļŹ░, ņ╗┤Ēī®ĒŖĖ ņ╣┤ļ®öļØ╝ņØś ņ×ÉļÅÖ ņ┤łņĀÉ ņŗ£ņŖżĒģ£ņØ┤ļéś ļé┤ņŗ£Ļ▓ĮņŚÉņä£ ņé¼ņÜ®ļÉśļŖö ĻĖ░ņÜĖņ×ä ņĢĪņČöņŚÉņØ┤Ēä░ņÖĆ Ļ░ÖņØĆ Ļ││ņŚÉ ņé¼ņÜ®ļÉ£ļŗż.14,15) ņØ┤ņÖĆ ļŹöļČłņ¢┤ Tripathi et. alņØĆ IPMC ņĢĪņČöņŚÉņØ┤Ēä░ļź╝ ļŖźļÅÖĒśĢ ņ╣┤ĒģīĒä░ Ļ░ĆņØ┤ļō£ ņÖĆņØ┤ņ¢┤ ņŗ£ņŖżĒģ£ņŚÉ ņé¼ņÜ®ĒĢĀ ņłś ņ׳ļÅäļĪØ Ļ░£ļ░£ĒĢśļŖöļŹ░ ņä▒Ļ│ĄĒĢśņśĆļŗż.16) 2018ļģäņŚÉļŖö IPMCļź╝ ņé¼ņÜ®ĒĢ£ ņ×¼ĒÖ£ņÜ®Ļ░ĆļŖź ņĀÉņ×É ļööņŖżĒöīļĀłņØ┤ ņ¢┤Ēöīļ”¼ņ╝ĆņØ┤ņģśņØä ņäĀļ│┤ņśĆļŗż.17) ņĄ£ĻĘ╝ņŚÉ Chang et. alņØĆ ņĢĮņØä ņĀäļŗ¼ ĻĖ░ĻĄ¼ļĪ£ ņé¼ņÜ®ĒĢśļ®┤ņä£ ņāØļ¼╝ņØśĒĢÖ ļČäņĢ╝ļĪ£ļÅä ĒÖ£ņÜ®ļÅäļź╝ ļäōĒśĆ Ļ░ĆĻ│Ā ņ׳ļŗż.18) ĻĘĖļ¤¼ļéś IPMC ļÅä ļ¼╝ņ¦łņØś ĒŖ╣ņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ņä£ ļäśņ¢┤ņĢ╝ĒĢĀ ļ¼ĖņĀ£ļōżņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ņśłļź╝ ļōżņ¢┤, DC ņĀäņĢĢņŚÉņä£ņØś ņŖżĒŖĖļĀłņØĖ ņĢĮĒÖö, ļé«ņØĆ ņČ£ļĀź, ņÜ®ļ¦ż ņ”Øļ░£, Ēæ£ņżĆĒÖöļÉśņ¦Ć ņĢŖņØĆ ņżĆļ╣ä Ļ│╝ņĀĢ ļō▒ņØś ņÜöņåīļōżņØ┤ IPMCņØś ņä╝ņä£ļéś ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ņŹ©ņØś ņé¼ņÜ®ņØä ņĀ£ĒĢ£ĒĢśĻ│Ā ņ׳ņ¦Ćļ¦ī Ļ░£ņäĀļÉĀ ņŚ¼ņ¦ĆĻ░Ć ļ¦Äļŗż.6) ņĄ£ĻĘ╝ ļ¬ć ļģä Ļ░ä ĻĖ░ņĪ┤ ļ¼ĖņĀ£ņĀÉļōżņØä ĒĢ┤Ļ▓░ĒĢśĻ│Ā ļŹö ļéśņĢäĻ░Ć ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņŚÉ ĒÖ£ņÜ®ĒĢśĻĖ░ ņ£äĒĢ£ ļŗżņ¢æĒĢ£ ļ░®ņĢłļōżņØ┤ ņĀ£ņŗ£ļÉśņŚłļŗż. ĻĘĖ ņżæ ĒĢśļéśļŖö ņżĆļ╣äļŗ©Ļ│äņØś ņĄ£ņĀüĒÖöņÖĆ Ļ░£ņäĀņØä ĒåĄĒĢ┤ Ēæ£ļ®┤ņĀäĻĘ╣ņØä ĻĘĀļō▒ĒĢśĻ▓ī ĒśĢņä▒ĒĢśļŖö Ļ▓āņØ┤ļŗż.19,20) ĻĘĀļō▒ĒĢ£ Ēæ£ļ®┤ņĀäĻĘ╣ņØĆ ņāśĒöīņØ┤ ĻĘĀņØ╝ĒĢ£ ņä▒ļŖźņØä ļé╝ ņłś ņ׳Ļ▓ī ĒĢ┤ņżĆļŗż. Relaxation ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻ│Āņ×É ĒĢśļŖö ļģĖļĀźņ£╝ļĪ£ļŖö ļ¼╝ņØä ĻĖ░ļ░śņ£╝ļĪ£ ĒĢ£ IPMCņØś Ļ▓ĮņÜ░ ļ¼╝ņØś ĒĢ©ļ¤ēņØä ņĪ░ņĀłĒĢśĻ▒░ļéś ņĢäņśł ļ¼╝ņØä ļ╣äĒ£śļ░£ņä▒ ņÜ®ļ¦żļĪ£(ņŻ╝ļĪ£ ņØ┤ņś©ņä▒ ņĢĪņ▓┤) ļīĆņ▓┤ ĒĢśļŖö Ļ▓āņØ┤ ņ׳ļŗż.21ŌĆō24)
ņØ┤ ļģ╝ļ¼ĖņØĆ ņ£äņŚÉ ņä£ņłĀĒĢ£ IPMCĻ░Ć Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖö ļ¼ĖņĀ£ņĀÉļōżņØś ĒĢ┤Ļ▓░ļ▓Ģņ£╝ļĪ£ ņĀ£ņŗ£ļÉ£ Ēæ£ļ®┤ ņĀäĻĘ╣ņØś ņĄ£ņĀüĒÖö, Ļ│ĀļČäņ×É ļČäļ”¼ļ¦ē, ņĀäĻĘ╣ Ēæ£ļ®┤ ļō▒ļō▒ņØä ņĢīņĢäļ│┤Ļ│Āņ×É ĒĢ£ļŗż. ņØ┤ ļģ╝ļ¼ĖņØĆ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ņäĖ Ļ░£ņØś ņĀłļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ļŗż. ņ▓½ ļ▓łņ¦ĖļĪ£ IPMC ņØś ĻĄ¼ļÅÖņøÉļ”¼ļź╝ ņåīĻ░£ĒĢśĻ│Ā, IPMCņØś ņĢäņøāĒÆŗņØä ņĄ£ņĀüĒÖöĒĢśĻĖ░ ņ£äĒĢ£ ļŗżņ¢æĒĢ£ ļ░®ļ▓ĢņØĖ ņāśĒöī ņżĆļ╣äļŗ©Ļ│ä ņĄ£ņĀüĒÖö, relaxation ņĀ£Ļ▒░, ņČ£ļĀź Ļ░£ņäĀņØä ļŗżļŻ©Ļ│Ā, ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ IPMCļź╝ ņä╝ņä£ļĪ£ņŹ© ņØæņÜ®ĒĢśļŖö ļ░®ļ▓ĢņŚÉ ļīĆĒĢ┤ Ļ░äļŗ©Ē׳ ļģ╝ņØśĒĢśĻ│Āņ×É ĒĢ£ļŗż.
2. IPMC ļ│ĆĒśĢ ļ░Å ņä╝ņŗ▒ ļ®öņ╗żļŗłņ”ś
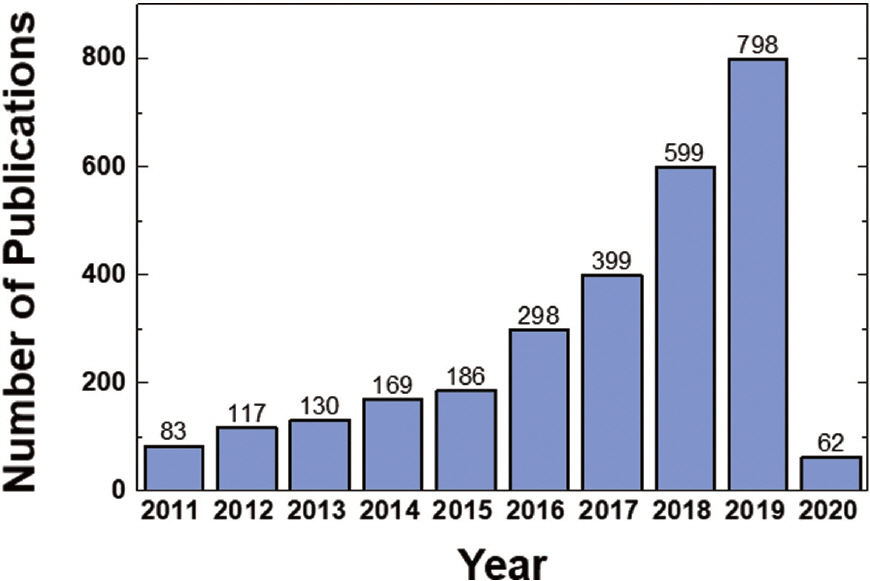
ņØ╝ļ░śņĀüņ£╝ļĪ£ IPMCļŖö ņäĖ Ļ░£ņØś ņĖĄņ£╝ļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ļŗż. ņĀäĒĢ┤ņ¦ł ļČäļ”¼ļ¦ēĻ│╝ ļæÉ Ļ░£ņØś ĻĘĆĻĖłņåŹņĖĄņØ┤ ļČäļ”¼ļ¦ēņØś ļæÉ ļ®┤ņŚÉ ņāīļō£ņ£äņ╣ś Ļ░ÖņØ┤ ņĪ┤ņ×¼ĒĢśļŖö ĻĄ¼ņĪ░ņØ┤ļŗż. ņĢĪņČöņŚÉņØ┤ĒīģņØä ĒĢśļŖö ļ®öņ╗żļŗłņ”śņØĆ ĻĘĖļ”╝ 2ņŚÉ ņĀ£ņŗ£ĒĢśņśĆļŗż. Nafion, Flemion, AciplexņÖĆ Ļ░ÖņØĆ ļ¼╝ņ¦łļōżņØ┤ ĒÖöĒĢÖņĀü ĻĄ¼ņĪ░Ļ░Ć ņ£Āņé¼ĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ IPMCņŚÉņä£ ĻĖ░ļ│Ė ļ®żļĖīļĀłņØĖņ£╝ļĪ£ ņō░ņØĖļŗż.25) ņĀäĻĘ╣ņĖĄņØĆ ĻĖ░ļ│Ė ļ®żļĖīļĀłņØĖ ņĖĄņØś ņ¢æļ®┤ņŚÉ ļÅäĻĖłĒĢśņŚ¼ ĒśĢņä▒ĒĢśļŖöļŹ░ ĻĖł, ļ░▒ĻĖł, ĒīöļØ╝ļōÉĻ│╝ Ļ░ÖņØĆ ĻĘĆĻĖłņåŹ ņŚ╝ņØ┤ļéś Ēś╝ĒĢ®ļÉ£ ņŚ╝ļōżņØä ņé¼ņÜ®ĒĢ£ļŗż.23 IPMCņŚÉ ņĀäĻĖ░ņןņØ┤ Ļ░ĆĒĢ┤ņ¦ĆĻ▓ī ļÉśļ®┤ ļČäļ”¼ļ¦ē ļé┤ļČĆņŚÉ ņ׳ļŹś ņ¢æņØ┤ņś©Ļ│╝ ļ¼╝ļČäņ×ÉĻ░Ć Ļ░ÖņØ┤ ņØīĻĘ╣ņ£╝ļĪ£ ņØ┤ļÅÖĒĢśĻ▓ī ļÉ£ļŗż. Ļ▓░Ļ│╝ņĀüņ£╝ļĪ£ ņ¢æņØ┤ņś©Ļ│╝ ļ¼╝ļČäņ×ÉņØś ļåŹļÅäĻ░Ć ņØ┤ļ░®ņä▒ņ£╝ļĪ£ ļČäĒżĒĢśĻ▓ī ļÉśĻ│Ā IPMCņØś ņØīĻĘ╣ ļČĆĻĘ╝ņŚÉņä£ ļ│ĆĒśĢņØ┤ ņØ╝ņ¢┤ļéśĻ▓ī ļÉśļ®░ ņ¢æĻĘ╣ņ£╝ļĪ£ IPMCĻ░Ć ĻĄ¼ļČĆļ¤¼ņ¦ĆļŖö ĒśäņāüņØ┤ ļéśĒāĆļéśĻ▓ī ļÉ£ļŗż.26) ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ĻĖ░Ļ│äņĀüņØĖ ļ│ĆĒśĢņØ┤ļéś ļŗżļźĖ ņ×ÉĻĘ╣ņØ┤ Ļ░ĆĒĢ┤ņ¦ĆĻ▓ī ļÉśļ®┤ IPMC ļé┤ļČĆņŚÉņä£ ļ░£ņāØĒĢśļŖö ļ│ĆĒśĢņ£©ņØś ĻĘĖļØ╝ļŹ░ņØ┤ņģśņ£╝ļĪ£ ņØĖĒĢ£ ņØ┤ņś©ņØś ņØ┤ļÅÖņØ┤ ņØ╝ņ¢┤ļéśĻ│Ā Ļ▓░Ļ│╝ņĀüņ£╝ļĪ£ IPMC ņØś ņ¢æ ņĀäĻĘ╣ņŚÉņä£ ņĀäņ£äņ░©ļź╝ ĒśĢņä▒ĒĢśĻ▓ī ļÉ£ļŗż.8) ņ£äņŚÉ ņä£ņłĀĒĢ£ ļé┤ņÜ®ņØä ĒåĄĒĢ┤ ņÜ░ļ”¼ļŖö IPMCĻ░Ć ļČäļ”¼ļ¦ēņØ┤ ņĪ┤ņ×¼ĒĢśļŖö ņżæĻ░äņĖĄ, ņ¢æņØ┤ņś©, ņÜ®ļ¦ż, ĻĘĖļ”¼Ļ│Ā ņĀäĻĘ╣ņĖĄĻ╣īņ¦Ć ņ┤Ø 4Ļ░Ćņ¦ĆļĪ£ ĻĄ¼ņä▒ļÉśņ¢┤ ņ׳ļŖö Ļ▓āņØä ņĢī ņłś ņ׳ļŗż. ļ¦ÄņØĆ ņŚ░ĻĄ¼ņ×ÉļōżņØ┤ ņØ┤ļ¤¼ĒĢ£ ņ×æļÅÖ ņøÉļ”¼ļź╝ ņØ┤ĒĢ┤ĒĢśĻ│Ā 4Ļ░Ćņ¦Ć ĻĄ¼ņä▒ ņÜöņåīļōżņØä Ē¢źņāüņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ņä£ ņŚ░ĻĄ¼ļź╝ ņ¦äĒ¢ēĒĢ┤ņÖöļŗż.
3. IPMC ņĢĪņČöņŚÉņØ┤ņģś ņä▒ļŖź ņĄ£ņĀüĒÖöļź╝ ņ£äĒĢ£ ļ░®ļ▓Ģ
Ēśäņ×¼ ņĄ£ņ▓©ļŗ© IPMC ņĀ£ņĪ░ĻĖ░ņłĀļōżņØĆ ņØ╝ļ░śņĀüņ£╝ļĪ£ ļäż Ļ░Ćņ¦Ć ļŗ©Ļ│äļź╝ ļ░śļō£ņŗ£ ĒżĒĢ©ĒĢ£ļŗż. Ēæ£ļ®┤ ņé¼ņĀäņ▓śļ”¼, ņ┤łĻĖ░ ĒĢ®ņä▒Ļ│╝ņĀĢ (ĒĢ©ņ╣© ĒÖśņøÉ, ĒÖśņøÉņĀ£ ļ│┤ĻĖē), Ēæ£ļ®┤ ņĀäĻĘ╣ ĒśĢņä▒(ļ¼╝ļ”¼ņĀü ņ”Øņ░®, ņĀäĻĖ░ļÅäĻĖł), ņØ┤ņś© ĻĄÉĒÖś ļŗ©Ļ│äļĪ£ ņØ┤ļŻ©ņ¢┤ņĀĖ ņ׳ļŗż. Ļ░üĻ░üņØś ļŗ©Ļ│äļŖö IPMCņØś ņä▒ļŖźņŚÉ ņśüĒ¢źņØä ņŻ╝ļŖö ļŗżņ¢æĒĢ£ ņÜöņØĖļōżņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖöļŹ░ ņØ┤ ņżæņŚÉņä£ ĒĢĄņŗ¼ņÜöņØĖļōżņØä ņĄ£ņĀüĒÖöĒĢśļŖö Ļ▓āņØ┤ ĒĢäņÜöĒĢśļŗż. 2012ļģä Chang et. alņØĆ ĒīöļØ╝ļōÉņØä ņĀäĻĘ╣ņ£╝ļĪ£ ņé¼ņÜ®ĒĢśļŖö IPMCņØś ĒÜ©Ļ│╝ņĀüņØĖ ņżĆļ╣ä ļ░®ļ▓ĢņØä ņĀ£ņĢłĒĢśņśĆļŗż.27) ļģ╝ļ¼ĖņŚÉ ļö░ļź┤ļ®┤ ņĀäņ▓┤ņĀüņØĖ ņżĆļ╣äĻ│╝ņĀĢņØä ņäĖ Ļ░Ćņ¦Ć ĒĢĄņŗ¼ņĀüņØĖ ļŗ©Ļ│äļĪ£ ļéśļłī ņłś ņ׳ļŖöļŹ░ ņ▓½ ļ▓łņ¦ĖļŖö ņĀäņ▓śļ”¼, ļæÉļ▓łņ¦ĖļŖö ĒĢ©ņ╣© ĒÖśņøÉ ļÅäĻĖł, ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ ņ×ÉĻ░Ćņ┤ēļ¦żņĀü ļÅäĻĖłņØ┤ļŗż.
IPMCņØś ņ×Éņ▓┤ņĀüņØĖ ļ¼╝ņä▒ļÅä ņä▒ļŖźņŚÉ ņśüĒ¢źņØä ņŻ╝ļŖöļŹ░ Ēæ£ļ®┤ ņĀĆĒĢŁ, ĻĄ¼ļČĆļ”╝ ņĀĆĒĢŁ, ņ£ĀņĀäĻ│äņłś Ļ░ÖņØĆ ņÜöņåīļōżņØ┤ ļīĆĒæ£ņĀüņØ┤ļŗż. 2014ļģä Wang et. alņØĆ IPMCņØś ļ¼╝ļ”¼ņĀü ņä▒ņ¦łĻ│╝ ņĀäĻĖ░ĻĖ░Ļ│äņĀü ņä▒ņ¦łņØ┤ ņ▓śļ”¼ ļŗ©Ļ│äņŚÉ ņØśĒĢ┤ņä£ ņ¢┤ļ¢╗Ļ▓ī ņśüĒ¢źņØä ļ░øļŖöņ¦Ć ļ│┤Ļ│ĀĒĢśņśĆļŗż.28) Wang et. alņØĆ ņé¼ņĀä ņ▓śļ”¼, ĒĢ©ņ╣© ĒÖśņøÉ, ĒÖöĒĢÖ ļÅäĻĖłĻ│╝ Ļ░ÖņØĆ ĒĢĄņŗ¼ņĀüņØĖ ļŗ©Ļ│äļź╝ ņĪ░ĒĢ®ĒĢśņŚ¼ ņä£ļĪ£ ļŗżļźĖ ĒŖ╣ņ¦ĢņØä Ļ░Ćņ¦ä IPMCļź╝ ņĀ£ņ×æĒĢśņśĆļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ IPMC ņä▒ļŖźņØś ļ¼╝ļ”¼ņĀü ņÜöņØĖņŚÉ ņØśĒĢ£ ņśüĒ¢źĻ│╝ Ēæ£ļ®┤Ļ│╝ ņØĖĒä░ĒÄśņØ┤ņŖż ņĀäĻĘ╣ņØś ĒśĢņä▒ ļ®öņ╗żļŗłņ”śņØä ļ░ØĒśĆļāłļŗż. ņé¼ņĀäņ▓śļ”¼ļŖö Ļ▒░ņ╣£ Ēæ£ļ®┤ņØä ĒśĢņä▒ĒĢśņŚ¼ ņĀäĻĘ╣ņØ┤ ļŹö Ļ╣ŖĻ▓ī Ēæ£ļ®┤ņØä ĒīīĻ│Āļōż ņłś ņ׳Ļ▓ī ļ¦īļōżņŚłĻ│Ā ĻĄ¼ļČĆļ”╝ ņĀĆĒĢŁņØä Ļ░Éņåīņŗ£ņ╝░ļŗż. ĒĢ©ņ╣© ĒÖśņøÉ Ļ│╝ņĀĢņØĆ ņżæĻ░äņĖĄņØĖ ļČäļ”¼ļ¦ēņ£╝ļĪ£ ņĀäĻĘ╣ņØ┤ ļŹö ņäĖņäĖĒĢśĻ▓ī ņ╣©Ēł¼ĒĢśļŖö Ļ▓āņØä ļÅĢļŖö ņŚŁĒĢĀņØä ĒĢśņśĆļŗż. ļśÉĒĢ£ ĒĢ©ņ╣© ĒÖśņøÉņ£╝ļĪ£ ĒśĢņä▒ļÉ£ ļéśļģĖņ×ģņ×É ņĀäĻĘ╣ņØĆ ļäōņØĆ ļČäņé░ ņśüņŚŁņØĆ IPMCņØś ņĀĢņĀäņÜ®ļ¤ēņØä ļåÆņØ┤ļŖö ņŚŁĒĢĀņØä Ē¢łļŗż. ņØ┤ļ¤¼ĒĢ£ ņ▓śļ”¼ļź╝ ĒåĄĒĢ┤ ņżĆļ╣äļÉ£ ņāśĒöīņØĆ ĻĖ░ņĪ┤ņØś Ļ▒░ņ╣Āņ¦Ć ņĢŖņØĆ Ēæ£ļ®┤ņØä Ļ░Ćņ¦ä IPMCņÖĆ ļ╣äĻĄÉĒĢśņśĆņØä ļĢī 1.7V ņŚÉņä£ ņĄ£ļīĆ 10mmņØś ļ│ĆĒśĢņ£©ņØä ļ│┤ņŚ¼ ļŹö ņóŗņØĆ ņä▒ļŖźņØä ņ×ģņ”ØĒĢśņśĆļŗż.
2016ļģäņŚÉļŖö Stoimenov et. alņØĆ ļ¬©ļלļČäņé¼ ļ░®ļ▓ĢņØä ĒåĄĒĢ┤ņä£ Ēæ£ļ®┤ņØä Ļ▒░ņ╣ĀĻ▓ī ĒĢśļŖö Ļ▓āņØ┤ Ļ│äļ®┤ņĀäĻĘ╣ ļ░Å Ēæ£ļ®┤ņØś ņāüĒā£ņŚÉ ņ¢┤ļ¢ż ņśüĒ¢źņØä ļü╝ņ╣śļŖöņ¦ĆņŚÉ ļīĆĒĢ£ ņŚ░ĻĄ¼ļź╝ ļ░£Ēæ£ĒĢśņśĆļŗż.29) ļ¬©ļלļČäņé¼ļŖö ņżæĻ░äņŚÉ ņ׳ļŖö ļČäļ”¼ļ¦ēņØś ĒÖöĒĢÖņĀüņØĖ ņåÉņāüņŚåņØ┤ ņåÉņēĮĻ▓ī Ēæ£ļ®┤ Ļ▒░ņ╣ĀĻĖ░ļź╝ ĒåĄņĀ£ĒĢśļŖö ļ░®ļ▓ĢņØĖļŹ░ ļ¬©ļלļČäņé¼ ņŗ£Ļ░äĻ│╝ ļ¬©ļלņ×ģņ×ÉņØś ņé¼ņØ┤ņ”łļź╝ ņĪ░ņĀłĒĢśļŖö Ļ▓āņ£╝ļĪ£ Nafion Ēæ£ļ®┤ ĒöäļĪ£ĒīīņØ╝ņØä ļŗżņ¢æĒĢśĻ▓ī ņ¢╗ņØä ņłś ņ׳ņØīņØä ļ│┤ņŚ¼ņż¼ļŗż. ņØ┤ļź╝ ĒåĄĒĢ┤ ņ¢╗ņ¢┤ņ¦ä ļČäļ”¼ļ¦ēņØä ņØ┤ņÜ®ĒĢśņŚ¼ IPMCņØś Ēæ£ļ®┤ ņĀĆĒĢŁ, ļō▒Ļ░Ć ļ¬©ļōłļ¤¼ņŖż, ņĀĢņĀäņÜ®ļ¤ēņØä ņĄ£ņĀüĒÖöņŚÉ ņä▒Ļ│ĄĒĢśņśĆļŗż.30)
ļ¼╝ņØä ņÜ®ļ¦żļĪ£ ņō░ļŖö IPMCņŚÉ DC ņĀäņĢĢņØ┤ ņØĖĻ░ĆļÉśļŖö Ļ▓ĮņÜ░ IPMCĻ░Ć ĻĖēņåŹļÅäļĪ£ ļ│ĆĒśĢļÉśņ¦Ćļ¦ī ņ┤łĻĖ░ņØś ņ¦ĆņĀÉņ£╝ļĪ£ ļŖÉļ”¼Ļ▓ī ļÅīņĢäņś©ļŗż.31,32) ņØ┤ ļĢī IPMCĻ░Ć ņ┤łĻĖ░ ņ¦ĆņĀÉņØä ļ▓Śņ¢┤ļéś ĒÜīļ│ĄļÉ£ļŗżļŖö ļŗ©ņĀÉņØ┤ ņĪ┤ņ×¼ĒĢśļŖöļŹ░ ņØ┤Ļ▓āņØä Relaxation effect ļØ╝Ļ│Ā ĒĢ£ļŗż. ņØ┤ļ¤░ relaxationņØĆ IPMCĻ░Ć Ļ░¢ļŖö Ļ░Ćņן Ēü░ ļŗ©ņĀÉņØ┤ļ®░ ņĢĪņČöņŚÉņØ┤Ēä░ļź╝ ļČłņĢłņĀĢĒĢśĻ▓ī ļ¦īļōżĻĖ░ ļĢīļ¼ĖņŚÉ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżļĪ£ ņé¼ņÜ®ņØä ņĀ£ĒĢ£ĒĢśļŖö ņÜöņåīĻ░Ć ļÉ£ļŗż. Ēśäņ×¼ļŖö ņØ┤ļ¤¼ĒĢ£ ļŗ©ņĀÉņØä ĻĘ╣ļ│ĄĒĢśĻĖ░ ņ£äĒĢ£ ļæÉ Ļ░Ćņ¦Ć ļ░®ņŗØņØ┤ Ļ░£ļ░£ļÉśņŚłļŖöļŹ░ ņ▓½ ļ▓łņ¦ĖļŖö IPMC ļ¼╝ņØś ĒĢ©ļ¤ēņØä ņĪ░ņĀłĒĢśļŖö ļ░®ņŗØņØ┤Ļ│Ā21,22) ļæÉ ļ▓łņ¦ĖļŖö ņØ┤ņś©ņä▒ ņĢĪņ▓┤ļź╝ ņÜ®ļ¦żļĪ£ ņō░ļŖö ļ░®ņŗØņØ┤ļŗż.23,24)
IPMCņŚÉņä£ ļ¼╝ņØś ĒĢ©ļ¤ēņØĆ relaxationņŚÉ ņśüĒ¢źņØä ņŻ╝ļŖö ĒĢĄņŗ¼ņÜöņåīļĪ£33) Wang et. alņØĆ ĻĖł ĒāĆņ×ģĻ│╝ ĒīöļØ╝ļōÉ ĒāĆņ×ģņØś IPMCļōżņØś ņĀäĻĖ░ĻĖ░Ļ│äņĀü ņä▒ņ¦łņØ┤ ĒāłņłśņŚÉ ņØśĒĢ┤ņä£ ņ¢┤ļ¢ż ņśüĒ¢źņØä ļ░øļŖöņ¦ĆņŚÉ ļīĆĒĢ┤ ļ│┤Ļ│ĀĒĢ£ ļ░öĻ░Ć ņ׳ļŗż.23) ļģ╝ļ¼ĖņŚÉ ļö░ļź┤ļ®┤ IPMCņØś ņłśļČäĒĢ©ļ¤ēņŚÉ ļö░ļØ╝ņä£ Ēæ£ļ®┤ņĀäĻĘ╣ņØś ĒśĢĒā£Ļ░Ć ļ░öļĆīĻ│Ā, ļŹö ļéśņĢäĻ░Ć ņĢĪņČöņŚÉņØ┤ņģśņŚÉņä£ ņżæņÜöĒĢ£ ņŚŁĒĢĀņØä ĒĢśļŖö ļ¼╝ļ”¼ņĀü ĒŖ╣ņä▒ņØĖ Ēæ£ļ®┤ ņĀĆĒĢŁ, ņĀĢņĀäņÜ®ļ¤ē, ļŗ©ļŗ©ĒĢ© ļō▒ņŚÉļÅä ņśüĒ¢źņØä ņżĆļŗżļŖö Ļ▓āņØä ļ│┤ņŚ¼ņż¼ļŗż.
ņĀäĒåĄņĀüņ£╝ļĪ£ Nafion 117ņØĆ IPMCņŚÉ Ļ░Ćņן ļ¦ÄņØ┤ ņØ┤ņÜ®ļÉśļŖö ļČäļ”¼ļ¦ēņ£╝ļĪ£ 180umņĀĢļÅäņØś ļæÉĻ╗śļź╝ Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŗż. ĻĘĖļ¤░ļŹ░ Nafion 117ņØä ņé¼ņÜ®ĒĢ£ IPMCņØś Ļ▓ĮņÜ░ņŚÉļŖö ņ¢ćņØĆ ļæÉĻ╗śļĪ£ ņØĖĒĢ┤ 10mNļ│┤ļŗż ļé«ņØĆ ņČ£ļĀźņØä ļ│┤ņŚ¼ņä£ ļåÆņØĆ ņČ£ļĀźņØä ņÜöĻĄ¼ĒĢśļŖö Ļ││ņŚÉņä£ļŖö ņō░ļŖö Ļ▓āņØ┤ ņĀ£ĒĢ£ļÉśņŚłļŗż. ņØ┤ļ¤░ ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻĖ░ ņ£äĒĢ£ Ļ░Ćņן ĒÜ©Ļ│╝ņĀüņØĖ ļ░®ļ▓ĢņØĆ ļŹö ļæÉĻ║╝ņÜ┤ ļČäļ”¼ļ¦ēņØä ņé¼ņÜ®ĒĢśļŖö Ļ▓āņØ┤ļŗż. ļæÉĻ║╝ņÜ┤ ļČäļ”¼ļ¦ēņØä ņĀ£ņ×æĒĢśĻĖ░ ņ£äĒĢ┤ ņÜ®ņĢĪ ņ║ÉņŖżĒīģļ░®ņŗØņØ┤ ņĀ£ņĢłļÉśņŚłļŗż.21,34) ņØ┤ļź╝ ĒåĄĒĢ┤ ļ¦īļōżņ¢┤ņ¦ä IPMC ļŖö ļæÉĻ╗ś 1.12mm, ļäłļ╣ä 4mm, ĻĖĖņØ┤ 30mmņØś ņĀ£ņøÉņØä Ļ░¢Ļ│Ā 3VņØś ņĀäņĢĢņŚÉņä£ 44.1mNņØś ņČ£ļĀźņØä ļ│┤ņśĆļŗż. 2011ļģäņŚÉļŖö He et. alņØĆ ļŗżņ¢æĒĢ£ ļæÉĻ╗śņØś IPMC ņä▒ļŖźņØä ļ│┤Ļ│ĀĒĢśņśĆļŖöļŹ░ 3.5VņØś ņĀäņĢĢņŚÉņä£ 0.22mmņŚÉņä£ 0.42mm, 0.8mmļĪ£ ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ ļ│ĆĒśĢņØĆ Ļ░üĻ░ü 26.1%, 46.3% Ļ░ÉņåīĒĢśņśĆņ£╝ļéś ņČ£ļĀźņŚÉņä£ļŖö Ļ░üĻ░ü 100.6%, 13.8%ņØś ņä▒ļŖź Ē¢źņāüņØä Ļ░ĆņĀĖņÖöļŗż.35) ņØ┤ļ¤¼ĒĢ£ Ļ▓░Ļ│╝ļź╝ ĒåĀļīĆļĪ£ Nafion ļČäļ”¼ļ¦ēņØś ļæÉĻ╗śĻ░Ć ņ”ØĻ░ĆĒĢ©ņŚÉ ļö░ļØ╝ IPMCņØś ņČ£ļĀźņØ┤ Ē¢źņāüļÉ©ņØä ņĢī ņłś ņ׳ļŗż.
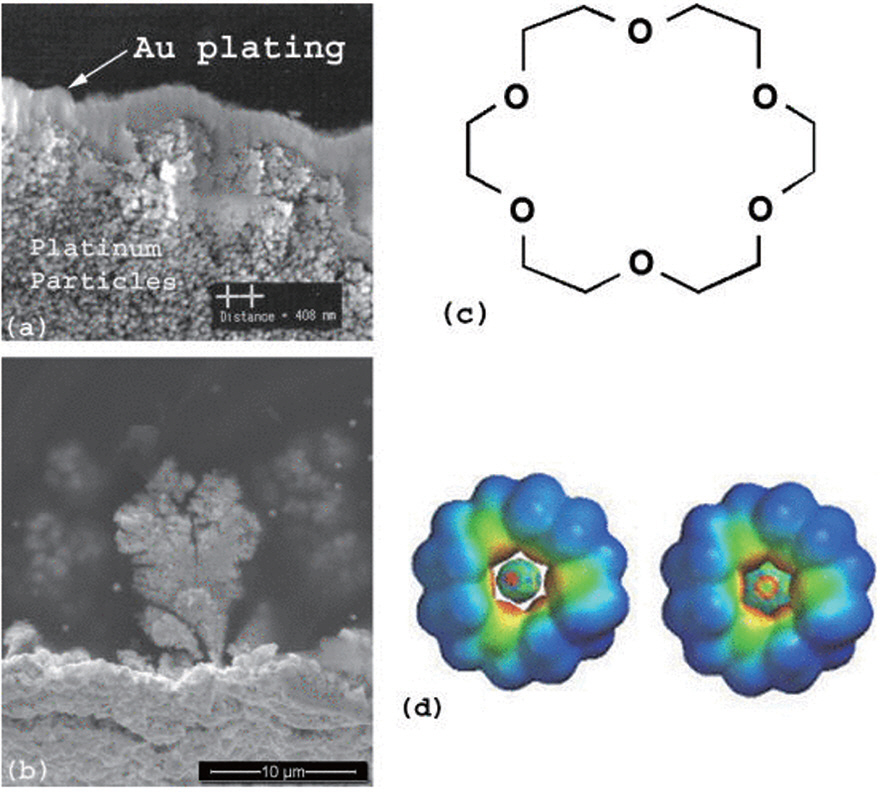
Fig.┬Ā3.
(a) ĻĖłĻ│╝ ļ░▒ĻĖłņ£╝ļĪ£ ņĀäĻĖ░ ļÅäĻĖłļÉ£ Nafion-117ņØś ļŗ©ļ®┤ SEM ņé¼ņ¦ä. (b) ĻĖłņ£╝ļĪ£ ņĀäĻĖ░ ļÅäĻĖłļÉ£ FlemionņØś ļŗ©ļ®┤ SEM ņé¼ņ¦ä (c) 18-Crown-6ņØś ĒÖöĒĢÖĻĄ¼ņĪ░ (d) 18-Crown-6ņŚÉ ļæśļ¤¼ņŗĖņØĖ ļéśĒŖĖļź© ņ¢æņØ┤ņś©(ņóīņĖĪ)Ļ│╝ ņ╣╝ļź© ņ¢æņØ┤ņś©(ņÜ░ņĖĪ) Journal of Applied PhysicsņØś Ļ░£ņĀ£ ĒŚłĻ░Ćļź╝ ļ░øņØī.
ļŗżļźĖ ņČ£ļĀźĒ¢źņāü ļ░®ļ▓Ģņ£╝ļĪ£ļŖö IPMCņØś Ļ│ĀļČäņ×É ļČäļ”¼ļ¦ēņŚÉ ņ▓©Ļ░Ćļ¼╝ņØä ņŻ╝ņ×ģĒĢśļŖö ļ░®ņŗØņØ┤ ņ׳ļŗż. Guo et. alņØĆ ņłśņÜ®ĒĢ┤ņä▒ ņäżĒÅ░ĒÖö ļŗżņĖĄ ĒāäņåīļéśļģĖĒŖ£ļĖīļź╝ NafionņŚÉ ņŻ╝ņ×ģĒĢśņŚ¼ ļé«ņØĆ ņĀäņĢĢņŚÉņä£ļÅä ļåÆņØĆ ļ│ĆĒśĢņØä ļ│┤ņØ┤ļŖö ņāłļĪ£ņÜ┤ ņóģļźśņØś IPMCļź╝ Ļ░£ļ░£ĒĢśņśĆĻ│Ā 3VņØś ņĀäņĢĢņØ┤ Ļ░ĆĒĢ┤ņĪīņØä ļĢī 9.2mNņØś ņČ£ļĀźņØä ļ│┤ņśĆļŗż.36) Wang et. al Ļ▓ĮņÜ░ņŚÉļŖö Ļ│ĀļČäņ×É ļČäļ”¼ļ¦ēņØä ņÜ®ņĢĪ ņ║ÉņŖżĒīģņØä ĒĢĀ ļĢī ņ▓©Ļ░Ćļ¼╝ņØä ļäŻņ¢┤ņä£ ĻĘĖņŚÉ ļö░ļźĖ ņśüĒ¢źņØä ļ│┤ļŖö ņŚ░ĻĄ¼ļź╝ ļ│┤Ļ│ĀĒĢśņśĆļŗż.37) ņŚÉĒŗĖļĀīĻĖĆļ”¼ņĮ£, ļööļ®öĒŗĖņäżĒÅŁņé¼ņØ┤ļō£, N,N-ļööļ®öĒŗĖĒżļ”äņĢäļ»Ėļō£, N-ļ®öĒŗĖĒżļ”äņĢäļ»Ėļō£ļź╝ ņŻ╝ņ×ģĒĢśņśĆņØä ļĢīņØś ņśüĒ¢źņØä ļ│┤ņĢśļŖöļŹ░, ņŚÉĒŗĖļĀīĻĖĆļ”¼ņĮ£ņØä ņŻ╝ņ×ģĒĢśņŚ¼ ņĀ£ņ×æĒĢ£ IPMC ņĢĪņČöņŚÉņØ┤Ēä░ļŖö 4mmļØ╝ļŖö Ēü░ ļ│ĆĒśĢĻ│╝ 2V ņĀäņĢĢņŚÉņä£ 1.5mNņØś ņČ£ļĀźņ£╝ļĪ£ ņ▓©Ļ░Ćļ¼╝ņØ┤ ņŚåļŖö IPMC ņĢĪņČöņŚÉņØ┤Ēä░ņŚÉ ļ╣äĒĢ┤ ļåÆņØĆ ņĀäĻĖ░ĻĖ░Ļ│äņĀü ĒŖ╣ņä▒ņØä ļ│┤ņśĆļŗż. ņČöĻ░ĆņĀüņ£╝ļĪ£ Dai et. alņØĆ ļČäļ”¼ļ¦ēĻ│╝ ņ¢æņØ┤ņś©ņØś ņóģļźśļź╝ ņĄ£ņĀüĒÖöĒĢśņŚ¼ ņČ£ļĀźņØä ļåÆņØ┤Ļ│Āņ×É ĒĢśņśĆņ£╝ļ®░, IPMCņŚÉ ļŗżņ¢æĒĢ£ ņ▓©Ļ░Ćļ¼╝ņØä ņŻ╝ņ×ģĒĢśĻ│Āņ×É ĒĢśļŖö ņŗ£ļÅä ļśÉĒĢ£ ņØ┤ļŻ©ņ¢┤ņĪīļŗż.38) ņØ┤ļ¤¼ĒĢ£ ļ░®ļ▓Ģ ņÖĖņŚÉļÅä ņāłļĪ£ņÜ┤ ĻĄ¼ņĪ░ļź╝ ļÅäņ×ģĒĢśņŚ¼ ņČ£ļĀźņØä ļåÆņØ┤Ļ│Āņ×É ĒĢśļŖö ņŗ£ļÅäĻ░Ć ņ׳ņŚłļŗż. 2018ļģä Chang et. alņØĆ ĒĢ£ņ¬Į ļ®┤ļ¦ī ņĀäĻĘ╣ņØ┤ ņ׳ļŖö IPMC ņĢĪņČöņŚÉņØ┤Ēä░ļź╝ ņäĀļ│┤ņśĆļŖöļŹ░ Sņ×ÉļĪ£ Ēü░ ļ│ĆĒśĢņØ┤ ņØ╝ņ¢┤ļéśļ®┤ņä£ļÅä ļåÆņØĆ ņČ£ļĀźņØä ļ│┤ņśĆļŗż.39)
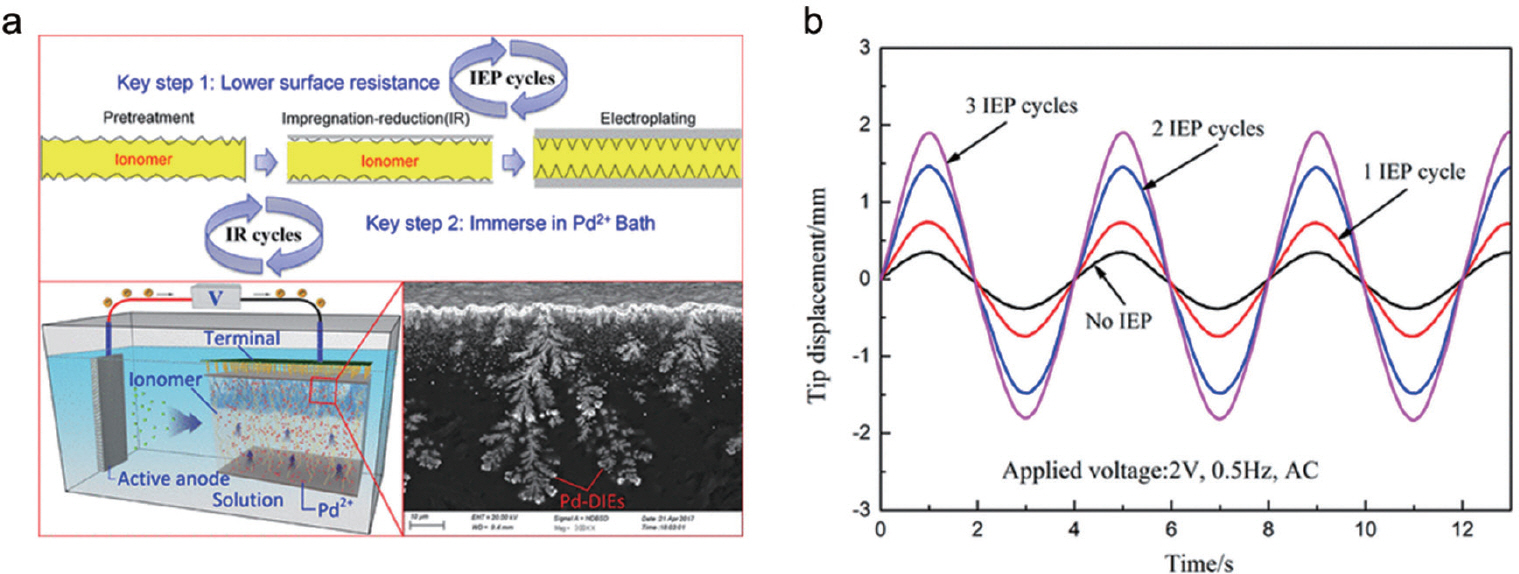
Fig.┬Ā4.
(a) ņĀäņ▓śļ”¼, ĒĢ©ņ╣© ĒÖśņøÉ, ņĀäĻĖ░ ļÅäĻĖł Ļ│╝ņĀĢņØä Ļ▒░ņ│É ĒīöļØ╝ļōÉ Ļ│äļ®┤ņĀäĻĘ╣ ĒśĢņä▒ĒĢśļŖö Ļ│╝ņĀĢĻ│╝ IPMC Ēæ£ļ®┤ļé┤ņŚÉņä£ ņāØņä▒ļÉ£ dendritic Ļ│äļ®┤ņĀäĻĘ╣ņØś ļŗ©ļ®┤ SEM ņé¼ņ¦ä (b) ĒĢ©ņ╣© ĒÖśņøÉ ĒܤņłśņŚÉ ļö░ļźĖ IPMCņĢĪņČöņŚÉņØ┤Ēä░ņØś ļ│ĆĒśĢ ĻĘĖļלĒöä(2V, 0.5HzņØś ĻĄÉļźś ņĀäņĢĢ)45. ACS Applied Materials and InterfacesņØś Ļ░£ņĀ£ ĒŚłĻ░Ćļź╝ ļ░øņØī.
IPMCļŖö ņØ┤ņśżļģĖļ©ĖņÖĆ ĻĘĖ ņ¢æņ¬ĮņŚÉ ļČÖņ¢┤ņ׳ļŖö ĻĖłņåŹ ņĀäĻĘ╣ņ£╝ļĪ£ ĻĄ¼ņä▒ļÉ£ļŗż. ņØ┤ņśżļģĖļ©ĖņÖĆ Ēæ£ļ®┤ ņĀäĻĘ╣ņé¼ņØ┤ņŚÉļŖö Ļ│äļ®┤ņĖĄņØ┤ ņ׳ļŖöļŹ░ ņØ┤ ņĖĄņØ┤ IPMCņØś ņä▒ļŖźņŚÉ ļ¦ÄņØĆ ņśüĒ¢źņØä ņżĆļŗż. ĒŖ╣Ē׳ IPMCņØś ņĢĪņČöņŚÉņØ┤ņģś ļŖźļĀźņØĆ ņØ┤ ņĖĄņŚÉ ņØśĒĢ£ ņśüĒ¢źņØä ļ¦ÄņØ┤ ļ░øļŖö Ļ▓āņØ┤ ļ¬ģĒÖĢĒĢśĻ▓ī ņĢīļĀżņĪīļŖöļŹ░ ņØ┤ļŖö Ļ│äļ®┤ ļ®┤ņĀüņØś ņ”ØĻ░ĆĻ░Ć ņĢĪņČöņŚÉņØ┤ņģśņŚÉ ņ¦üņĀæņĀüņØĖ ņśüĒ¢źņØä ņŻ╝ļŖö ņĀĢņĀäņÜ®ļ¤ēņØś ņ”ØĻ░Ćļź╝ ņ£ĀļÅäĒĢśĻĖ░ ļĢīļ¼ĖņØ┤ļŗż.40)
Ēśäņ×¼Ļ╣īņ¦Ć IPMC Ļ│äļ®┤ ņĀäĻĘ╣ņØĆ dendriticĻ│╝ granularĒāĆņ×ģņ£╝ļĪ£ ļČäļźśļÉśņŚłļŗż. Asaka et. alņØĆ ĻĖłņØä ņØ┤ņÜ®ĒĢ£ IPMC ņØś dendritic Ļ│äļ®┤ ņĀäĻĘ╣ņØä Ļ░£ļ░£ĒĢśņśĆĻ│Ā,41) ņØ┤ņ¢┤ņä£ ChenĻ│╝ Kim et. alņØĆ Ļ░üĻ░ü ļ░▒ĻĖłĻ│╝ ĒīöļØ╝ļōÉņØä ņé¼ņÜ®ĒĢ£ granular ĒāĆņ×ģņØś Ļ│äļ®┤ņĀäĻĘ╣ņØä Ļ░£ļ░£ĒĢśņśĆļŗż.42) ņØ┤ ņĀäĻĘ╣ļōżņØä ņØ┤ņÜ®ĒĢ£ IPMCņØś ņĀĢņĀäņÜ®ļ¤ēņØĆ Ļ░üĻ░ü 1.5, 0.22, 0.34mF/cm2 ļĪ£, ĻĖłņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļ¦īļōĀ dendritic Ļ│äļ®┤ ņĀäĻĘ╣ņØ┤ ļŗżļźĖ ĻĄ¼ņĪ░ņŚÉ ļ╣äĒĢ┤ņä£ 7ļ░░ņŚÉņä£ 4ļ░░Ļ░Ćļ¤ē ņ”ØĻ░ĆĒĢ£ ņĀĢņĀäņÜ®ļ¤ēņØä Ļ░Ćņ¦ĆļŖö Ļ▓āņØä ļ│┤ņśĆļŗż. ņØ┤ļĀćĻ▓ī Ļ│äļ®┤ņĀäĻĘ╣ņØś ĻĄ¼ņĪ░ļź╝ ļ░öĻ┐łņ£╝ļĪ£ņŹ© ņĀĢņĀäņÜ®ļ¤ēņØä ļŖśļ”¼Ļ│Ā ņØ┤ļĪ£ ņØĖĒĢ┤ IPMCņØś ņĀäĻĖ░ĻĖ░Ļ│äņĀü ĒŖ╣ņä▒ņØä ĒÜ©Ļ│╝ņĀüņ£╝ļĪ£ ņ”ØĻ░Ćņŗ£Ēé¼ ņłś ņ׳Ļ▓ī ļÉśņŚłļŗż.
ņ£äņŚÉ ļ│┤Ļ│ĀļÉ£ ļģ╝ļ¼ĖļōżņØä ĒåĄĒĢśņŚ¼ ņĢīĻ▓ī ļÉ£ Ļ│äļ®┤ ņĀäĻĘ╣ņØś ņżæņÜöņä▒ņ£╝ļĪ£ ņØĖĒĢ┤ ņĄ£ĻĘ╝ņŚÉļŖö ļäōņØĆ Ļ│äļ®┤ņĀäĻĘ╣ņØä ĒśĢņä▒ĒĢśļŖö Ļ▓āņŚÉ ņ┤łņĀÉņØä ļ¦×ņČöĻ│Ā ņ׳ļŖö ņŚ░ĻĄ¼Ļ░Ć ļō▒ņןĒĢśņśĆĻ│Ā, ĒĢ©ņ╣© ĒÖśņøÉ, ĒÖśņøÉņĀ£ ņé╝Ēł¼, ņÜ®ņĢĪ ņ║ÉņŖżĒīģĻ│╝ Ļ░ÖņØ┤ ĒÖöĒĢÖņĀüņØĖ ļ░®ļ▓ĢņØ┤ļéś ņ¦üņĀæņĀüņ£╝ļĪ£ IPMCļź╝ ņĀ£ņ×æĒĢśļŖö Ļ│╝ņĀĢņŚÉņä£ Ļ│äļ®┤ ļ®┤ņĀüņØä ļŖśļ”¼ļŖö ļ░®ļ▓ĢņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ĒĢ©ņ╣© ļÅäĻĖł ļ░®ļ▓ĢĻ│╝ ĒÖśņøÉņĀ£ ņé╝Ēł¼ ļ░®ļ▓ĢņØä ņĪ░ĒĢ®ĒĢśļ®┤ ņØ┤ņśżļģĖļ©Ė ņĢłņ¬ĮņŚÉņä£ ĒīöļØ╝ļōÉ, ļ░▒ĻĖł, ņØĆ, ĻĄ¼ļ”¼ Ļ│äļ®┤ ņĀäĻĘ╣ņØś ļ®┤ņĀüņØä ņ”ØĻ░Ćņŗ£ĒéżļŖö dendritic Ļ│äļ®┤ ņĀäĻĘ╣ņØä ĒśĢņä▒ĒĢśļŖö Ļ▓āņØ┤ Ļ░ĆļŖźĒĢśļŗżļŖö Ļ▓āņØ┤ ļ│┤Ļ│ĀļÉśņŚłļŗż.43) Dendritic Ļ│äļ®┤ ņĀäĻĘ╣ ĒśĢņä▒ņØĆ ĻĖłņåŹņØś ņåīļ╣äļ¤ēņØä ņżäņØ┤ļ®┤ņä£ļÅä Ļ│äļ®┤ ļ®┤ņĀüņØä ļŖśļ”¼ļŖö Ļ▓āņ£╝ļĪ£ ļ░ØĒśĆņĀĖ44) IPMCņØś ņä▒ļŖźņØä Ē¢źņāüņŗ£ĒéżļŖöļŹ░ ņóŗņØĆ ļ░®ļ▓Ģņ£╝ļĪ£ ņĢīļĀżņĪīņ¦Ćļ¦ī, ņ▓śņØīņ£╝ļĪ£ ņØ┤ļź╝ ļ│┤Ļ│ĀĒĢ£ ņŚ░ĻĄ¼ņŚÉ ļö░ļź┤ļ®┤ dendritic Ļ│äļ®┤ņĀäĻĘ╣ņØś ĒśĢņä▒ņØĆ ĻĖł ņØ┤ņś©ņØ┤ ņä×ņØĖ ņÜ®ņĢĪņŚÉ ļ░śļ│ĄņĀüņ£╝ļĪ£ ĒĢ©ņ╣© ĒÖśņøÉņØä ĒĢśļŖö Ļ▓āņØ┤ ņ£ĀņØ╝ĒĢ£ ļ░®ļ▓ĢņØ┤ņŚłļŗż.
Wang et. alņØĆ ĒīöļØ╝ļōÉ, ļ░▒ĻĖł, ĻĖł, ĻĄ¼ļ”¼ dendritic Ļ│äļ®┤ņĀäĻĘ╣ņØä ļ╣Āļź┤Ļ│Ā Ļ░äļŗ©ĒĢśļ®┤ņä£ļÅä ĒÜ©ņ£©ņĀüņ£╝ļĪ£ Ļ│ĀļČäņ×É ļČäļ”¼ļ¦ē ņé¼ņØ┤ņŚÉ ĒśĢņä▒ĒĢśļŖö ļ░®ļ▓ĢņØä ņĀ£ņŗ£Ē¢łļŖöļŹ░ ĒīöļØ╝ļōÉ dendritic Ļ│äļ®┤ņĀäĻĘ╣ņØä ņśłņŗ£ļĪ£ ļōżļ®┤ ļŗżņØīĻ│╝ Ļ░ÖņØĆ ļ░®ņŗØņ£╝ļĪ£ ņĀäĻĘ╣ņØä ĒśĢņä▒ĒĢśĻ▓ī ļÉ£ļŗż.45) ņ▓½ ļ▓łņ¦Ė, Nafion ļČäļ”¼ļ¦ēņØś Ēæ£ļ®┤ņØä Ļ▒░ņ╣ĀĻĖ░ļź╝ ļåÆņŚ¼ņä£ Ēæ£ļ®┤ņĀüņØä ļŖśļ”¼ļŖöļŹ░ ņØ┤ļŖö ĒīöļØ╝ļōÉ ņØ┤ņś©ņØ┤ ĒĢ©ņ£ĀļÉ£ ņÜ®ņĢĪņŚÉņä£ ĒĢ©ņ╣© ĒÖśņøÉņØ┤ ņøÉĒÖ£ĒĢśĻ▓ī ņØ╝ņ¢┤ļéĀ ņłś ņ׳ļÅäļĪØ ļ¦īļōżņ¢┤ņżĆļŗż. ņØ┤ņ¢┤ņä£ ĒīöļØ╝ļōÉ ņØ┤ņś©ņØä ĻĖ░ņĪ┤ņŚÉ Nafion ļČäļ”¼ļ¦ēņŚÉ ņ׳ļŹś ņØ┤ņś©ļōżĻ│╝ ĻĄÉĒÖśĒĢśļŖö Ļ│╝ņĀĢņØä Ļ▒░ņ╣£ ļÆż ĒĢ©ņ╣© ĒÖśņøÉņØä ņ¦äĒ¢ēĒĢ£ļŗż. ĒĢ©ņ╣© ĒÖśņøÉ Ļ│╝ņĀĢņØĆ Ēæ£ļ®┤ņŚÉņä£ļČĆĒä░ ņØ╝ņ¢┤ļéśĻ▓ī ļÉśĻ│Ā ĒīöļØ╝ļōÉ ņøÉņ×ÉļōżņØĆ ļæÉĻ╗śĻ░Ć ļæÉĻ║╝ņøīņ¦ĆļŖö ļ░®Ē¢źņ£╝ļĪ£ ņĀÉņĀÉ ļŹö ņä▒ņןĒĢśĻ▓ī ļÉ£ļŗż. ļ¦łņ¦Ćļ¦ēņ£╝ļĪ£ ĒīöļØ╝ļōÉņØä ĒżĒĢ©ĒĢśĻ│Ā ņ׳ļŖö Nafion ļČäļ”¼ļ¦ēņØä ņĀäĻĖ░ļÅäĻĖłņØä ĒĢ£ļŗż. ĒÖöĒĢÖņĀü ļ░śņØæņØ┤ ņĀÉņ░© ņ¦äĒ¢ēļÉ©ņŚÉ ļö░ļØ╝ ņøÉļל ļČäļ”¼ļ¦ē ņĢłņŚÉ ņ׳ļŹś ĒīöļØ╝ļōÉ ņ×ģņ×ÉļōżņŚÉ ļŗżļźĖ ĒīöļØ╝ļōÉņØ┤ ļČÖĻ│Ā ņä▒ņןĒĢśņŚ¼ ņŻ╝ Ļ░Ćņ¦ĆļĪ£ ņ×ÉļØ╝Ļ▓ī ļÉśĻ│Ā Ļ▒░ĻĖ░ņŚÉ ļśÉļŗżļźĖ ņ×ģņ×ÉļōżņØ┤ ļČÖņ¢┤ņä£ ļŗżļźĖ Ļ░Ćņ¦ĆļōżņØä ĒśĢņä▒ĒĢśĻ▓ī ļÉ£ļŗż. ņØ┤ļ¤¼ĒĢ£ ļ░®ņŗØņ£╝ļĪ£ ņä▒ņןĒĢśĻ▓ī ļÉ£ dendritic ĒīöļØ╝ļōÉ Ļ│äļ®┤ ņĀäĻĘ╣ņØĆ ņżæĻ░äņĖĄņØĖ ņØ┤ņś©ņä▒ ĒÅ┤ļ”¼ļ©Ėļź╝ ļܽĻ│Ā ļ░śļīĆĒÄĖĻ│╝ ļŗ┐ņØä ļĢīĻ╣īņ¦Ć ņä▒ņןĒĢśļŖö Ļ▓āļÅä Ļ░ĆļŖźĒĢśļŗż. ņØ┤ļ¤¼ĒĢ£ dendritic Ļ│äļ®┤ ņĀäĻĘ╣ļōżņØĆ IPMCņØś ņĢĪņČöņŚÉņØ┤ņģś ņä▒ļŖź Ē¢źņāüņŚÉ ņøÉļÅÖļĀźņØ┤ ļÉśņŚłņ£╝ļ®░ ņĢĪņČöņŚÉņØ┤ņģś ņä▒ļŖź Ē¢źņāüņØĆ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņŚÉņä£ņØś ņĢĪņČöņŚÉņØ┤Ēä░ļĪ£ņŹ©ņØś ĒÖ£ņÜ®ņØä ņĢ×ļŗ╣ĻĖĖ Ļ▓āņØ┤ļŗż.
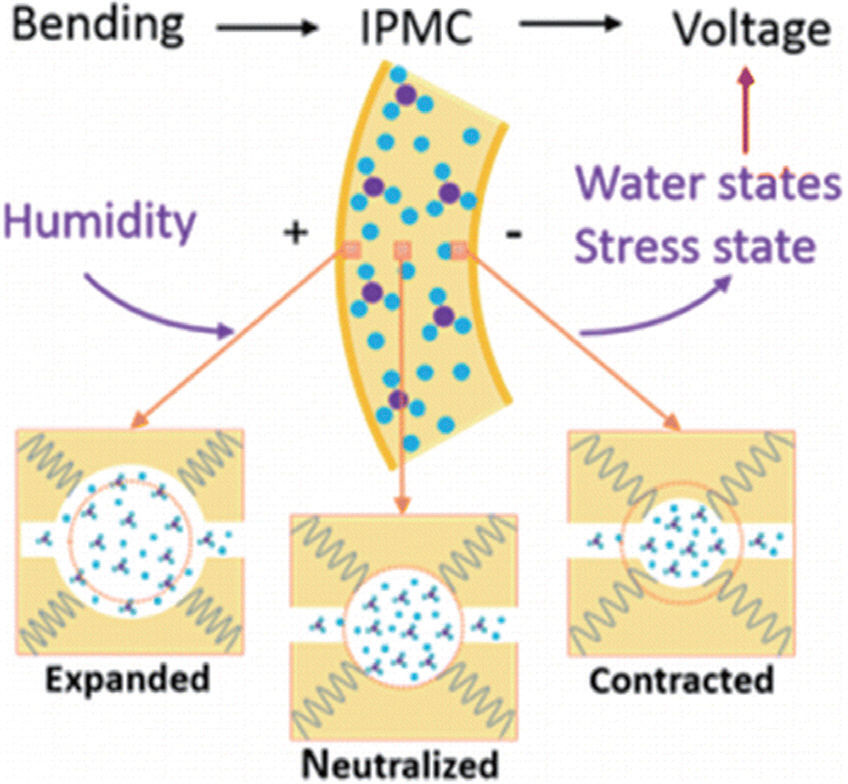
Fig.┬Ā5.
ņŖĄļÅäĻ░Ć ņ”ØĻ░ĆĒĢĀ Ļ▓ĮņÜ░ ļ░£ņāØĒĢśļŖö ĻĖ░Ļ│äņĀü ļ│ĆĒÖöņŚÉ ņØśĒĢ£ ņĀäņĢĢ ņ”ØĻ░Ć ļ®öņ╗żļŗłņ”ś ļ¬©ņŗØļÅä50 Journal of Physical ChemistryņØś Ļ░£ņĀ£ ĒŚłĻ░Ćļź╝ ļ░øņØī.
4. IPMC ņä╝ņä£
ņÖĖļČĆņŚÉņä£ ņŻ╝ņ¢┤ņ¦ä ņ×ÉĻĘ╣ņŚÉ ņØśĒĢ┤ņä£ IPMC ļé┤ļČĆņØś ņØ┤ņś© ņØ┤ļÅÖņØ┤ ņĀäĻĖ░ņĀüņØĖ ļ░śņØæņ£╝ļĪ£ ņØ┤ņ¢┤ņ¦äļŗżļŖö Ļ▓āņØĆ ņל ņĢīļĀżņĀĖ ņ׳ļŖö ņé¼ņŗżņØ┤ļŗż.46) ņØ┤ļ¤¼ĒĢ£ ļ®öņ╗żļŗłņ”śņØä ņØæņÜ®ĒĢśņŚ¼ IPMCļŖö ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņØś ļŗżņ¢æĒĢ£ ņä╝ņä£ļĪ£ņŹ© ļ│ĆĒśĢĻ░Éņ¦Ć, ņåŹļĀź, ņŖĄļÅäļ┐Éļ¦ī ņĢäļŗłļØ╝ ņØ┤ņś©ņØś ļČäĒżļź╝ ĒåĄĒĢ£ IPMC ņ£äņŚÉņä£ņØś ņ£äņ╣śĻ╣īņ¦Ć Ļ░Éņ¦ĆĒĢśļŖö Ļ▓āņØ┤ Ļ░ĆļŖźĒĢśļŗż. ņĄ£ĻĘ╝ņŚÉļŖö ņØ┤ļ¤¼ĒĢ£ ņä╝ņä£ļĪ£ņŹ©ņØś IPMC ņä▒ļŖźņØä ņĄ£ņĀüĒÖöĒĢśĻĖ░ ņ£äĒĢ£ ļ¦ÄņØĆ ņŚ░ĻĄ¼ļōżņØ┤ ņ¦äĒ¢ēļÉśĻ│Ā ņ׳ļŗż. Yamakita et. alņØĆ IPMCļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĢĪņČöņŚÉņØ┤ņģśĻ│╝ ņä╝ņŗ▒ņØä ļÅÖņŗ£ņŚÉ ĒĢĀ ņłś ņ׳ļŖö ņŚ░ĻĄ¼ļź╝ ļ│┤Ļ│ĀĒĢśņśĆĻ│Ā,9) Shahinpoor et. alņØĆ IPMCļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ 1mm ņØ┤ĒĢśņØś ļ│ĆĒśĢņŚÉņä£ 2mVņØś ņČ£ļĀźņØä Ļ░Ćņ¦ĆļŖö ņ╝äĒŗĖļĀłļ▓ä ņä╝ņä£ļź╝ Ļ░£ļ░£ĒĢśņśĆļŗż.47) ļ┐Éļ¦ī ņĢäļŗłļØ╝ Konyo et. alņØĆ IPMC ņ╝äĒŗĖļĀłļ▓äļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņåŹļÅäļź╝ Ļ░Éņ¦ĆĒĢśļŖö ņä╝ņä£ļź╝ Ļ░£ļ░£ĒĢśņśĆĻ│Ā 1Ōł╝12mV/(m/s)ņØś Ļ░Éņ¦ĆļŖźļĀźņØä ļ│┤ņØ┤ļŖö Ļ▓āņØä ņ×ģņ”Ø ĒĢśņśĆļŗż.48)
ņØ┤ļ¤¼ĒĢ£ ņŚ¼ļ¤¼Ļ░Ćņ¦Ć ņØæņÜ®ņĢłņŚÉļÅä ļČłĻĄ¼ĒĢśĻ│Ā IPMCļŖö ļŗ©ņĀÉņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖöļŹ░ ĻĘĖĻ▓āņØĆ ļ░öļĪ£ ļé«ņØĆ ņĀäĻĖ░ņĀü ņØæļŗĄņØ┤ļŗż. ņØ┤ļ¤¼ĒĢ£ ņĀÉņØä ĒĢ┤Ļ▓░ĒĢśĻ│Āņ×É Zhu et. alņØĆ ņÜ®ņĢĪ Ļ│ĄņĀĢņØä ņØ┤ņÜ®ĒĢ£ 3├Ś3 ļ░░ņŚ┤ņØś ņāłļĪ£ņÜ┤ ĒśĢĒā£ļź╝ Ļ░Ćņ¦ä IPMC ņä╝ņä£ļź╝ ņĀ£ņĢłĒĢśņśĆļŗż.49) ļīĆņ╣ŁņĀüņØĖ ĻĄ¼ņĪ░ņØĖ ļæÉ Ļ░£ņØś IPMCĻ░Ć ļÅÖņŗ£ņŚÉ ļ░śņØæĒĢśļ®░ ĻĘĖļĪ£ ņØĖĒĢ┤ ļ░£ņāØĒĢśļŖö ņĀäņĢĢņ░©ļź╝ Ļ░Éņ¦ĆĒĢśļŖö ņä╝ņä£ņØĖļŹ░ ņČ£ļĀź ņĀäņĢĢņØ┤ 25mVĻ╣īņ¦Ć ņ”ØĻ░ĆĒĢśļŖö Ļ▓āņØä ļ│┤ņśĆļŗż.
ļŹö ļéśņĢäĻ░Ć Zhu et. alņØĆ ĻĖłņØä ņØ┤ņÜ®ĒĢ£ IPMC ņä╝ņä£ļź╝ ļŗżņ¢æĒĢ£ ņŖĄļÅäĒÖśĻ▓ĮņŚÉ ļģĖņČ£ņŗ£ņ╝£ ņŖĄļÅäņŚÉ ņØśĒĢ£ ņśüĒ¢źņØä ņĢīņĢäļ│┤ļŖö ņŚ░ĻĄ¼ļź╝ ņ¦äĒ¢ēĒĢśņśĆļŗż. ņŚ░ĻĄ¼ņŚÉ ļö░ļź┤ļ®┤ IPMC ņä╝ņä£ņØś ņĀäĻĖ░ņĀüņØĖ ņØæļŗĄņØĆ ņŖĄļÅäņŚÉ ņØśĒĢ┤ņä£ ļ¦ÄņØĆ ņśüĒ¢źņØä ļ░øļŖö Ļ▓āņ£╝ļĪ£ ļ░ØĒśĆņĪīņ£╝ļ®░ ņØ┤ļŖö IPMCņØś ņŖĄļÅä ņä╝ņä£ļĪ£ņŹ© ņØæņÜ® Ļ░ĆļŖźņä▒ņØä ļ│┤ņŚ¼ņż¼ļŗż. ĻĄ¼ņĪ░ņĀüņØĖ ņØ┤ņĀÉņØä ņĘ©ĒĢśĻĖ░ ņ£äĒĢ£ ļģĖļĀźņØĆ ļŗżļźĖ ņŚ░ĻĄ¼ĒīĆņŚÉņä£ļÅä Ļ│äņåŹĒĢ┤ņä£ ņØ┤ļżäņĪīļŗż.50) Lei et. alņØĆ ĻĖ░ņĪ┤ņØś ņŖżĒŖĖļ”Į ĒśĢĒā£ņØś IPMCĻ░Ć ņĢäļŗī ĒŖ£ļĖī ĒśĢĒā£ņØś IPMCļź╝ ņäĀļ│┤ņśĆļŖöļŹ░, ĒŖ£ļĖī ņČĢ ļ░®Ē¢źņØä ņĀ£ņÖĖĒĢ£ ļŗżļźĖ ļ░®Ē¢źņŚÉņä£ ņśżļŖö ļ¬©ļōĀ ņ×ÉĻĘ╣ļōżņŚÉ ļīĆĒĢ┤ņä£ ļ¼╝ļ”¼ņĀüņØĖ ļ│ĆĒÖöļź╝ Ļ░Éņ¦ĆĒĢĀ ņłś ņ׳ļŖö ĒŖ╣ņä▒ņØä ņ¦Ćļģöļŗż.51) ņĄ£ĻĘ╝ņŚÉļŖö Zhu et. alņØ┤ ņāłļĪ£ņÜ┤ ĻĄ¼ņĪ░ņØś IPMCļź╝ ņäĀļ│┤ņśĆļŖöļŹ░ ņÜ®ņĢĪ Ļ│ĄņĀĢņØä ĒåĄĒĢ┤ņä£ ņĀ£ņ×æļÉ£ Ēö╝ļØ╝ļ»Ėļō£ ĒśĢĒā£ņØś ņä╝ņä£ļŖö ĻĖ░ņĪ┤ņØś ņŖżĒŖĖļ”Į ĒśĢĒā£ņØś IPMCņŚÉ ļ╣äĒĢ┤ņä£ Ēø©ņö¼ ļåÆņØĆ ņØæļŗĄņŗĀĒśĖļź╝ ļ│┤ņśĆļŗż.52)
Zhu et. alņØĆ ĻĄ¼ņĪ░ņĀü ļ│ĆĒÖöņŚÉņä£ ļ▓Śņ¢┤ļéś ļŗżņ¢æĒĢ£ ņŖĄļÅäņŚÉņä£ ļŗżņ¢æĒĢ£ ņ¢æņØ┤ņś©ņØä ņé¼ņÜ®ĒĢĀ ļĢī ļ░£ņāØĒĢśļŖö IPMC ņä╝ņä£ņØś ņĀäĻĖ░ņĀü ņØæļŗĄ ļśÉĒĢ£ ļ│┤Ļ│ĀĒĢśņśĆļŗż.50) Volpini et. alņØĆ IPMC Ļ░Ć ņĢĢņČĢļÉĀ ļĢī ņśłņāüļÉśļŖö ņØ┤ņś©ņØś ņøĆņ¦üņ×äņØä ņśłņĖĪĒĢśļŖö ļ¬©ļŹĖņØä ņĀ£ņĢłĒĢśņśĆļŗż.53) 2017ļģäņŚÉļŖö Gudarzi et. alņØĆ ņŖżĒŖĖļ”¼ļ░Ź ņĀäņ£äĻ░ĆņäżņØä ĻĖ░ļ░śņ£╝ļĪ£ IPMC ļÅÖņĀü ņĢĢļĀź ņä╝ņä£ļź╝ ņäżĻ│äĒĢ£ ļŗżņØī ņØ┤ļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ņĢĢņČĢ ļ░Å ņĀäļŗ© ļ¬©ļō£ņØś ņÖĖļČĆ ņĢĢļĀźņ£╝ļĪ£ ņØĖĒĢ┤ ņ×æļÅÖĒĢśļŖö ņČ®ņĀä ņĀäļźś ņāØņä▒ ļ®öņ╗żļŗłņ”śņØä ņĀ£ņŗ£ĒĢśņśĆļŗż.54,55) Wang et. alņØĆ IPMCņä╝ņä£ņØś ļæÉĻ╗śņÖĆ Ļ░ÖņØĆ ņĀ£ņøÉņØä Ļ│ĀļĀżĒĢśņŚ¼ IPMCĻ░Ć Ļ░Ćņ¦ĆļŖö ļæÉĻ╗ś, ĻĖĖņØ┤, ĒÅŁņØä ĒåĄĒĢ┤ ņä╝ņä£ņØś ņä▒ļŖźņØä ņśłņĖĪĒĢśļŖö ļģ╝ļ¼ĖņØä ļ│┤Ļ│ĀĒĢśņśĆļŗż.56)
5. Ļ▓░ļĪĀ
ņ¦Ćļé£ 5ļģäĻ░ä IPMCļź╝ ņé¼ņÜ®ĒĢ£ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ņ¢┤Ēöīļ”¼ņ╝ĆņØ┤ņģśļōżņØ┤ ņ×¼ļŻīĻ│╝ĒĢÖ, ļ¼╝ļ”¼ĒÖöĒĢÖ, ĒÖöĒĢÖ, Ļ│ĀļČäņ×É Ļ│╝ĒĢÖ, ņĀäĻĖ░Ļ│ĄĒĢÖ, ļéśļģĖĻ│╝ĒĢÖ, ņØæņÜ®ļ¼╝ļ”¼ņÖĆ Ļ░ÖņØĆ ļŗżņ¢æĒĢ£ ļČäņĢ╝ņŚÉņä£ Ļ┤Ćņŗ¼ņØä ļČłļ¤¼ņØ╝ņ£╝ņ╝░ļŗż.
IPMCļŖö ņ£ĀņŚ░ĒĢ£ ĒŖ╣ņä▒ņØä Ļ░¢Ļ│Ā ņĀäĻĖ░ņĀü ņŗĀĒśĖļź╝ ļ¼╝ļ”¼ņĀüņØĖ ļ│ĆĒśĢņ£╝ļĪ£ ļ│ĆĒÖśĒĢĀ ņłś ņ׳ņ£╝ļ®░ Ļ▓Įļ¤ēņä▒, ļČĆļō£ļ¤¼ņøĆ, ņĀĆņĀäļĀź ĻĄ¼ļÅÖ, ņ×ÉĻ░Ć Ļ░Éņ¦ĆļŖźļĀź ļō▒ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņŚÉņä£ ĒÖ£ņÜ®ļÉĀ ņłś ņ׳ļŖö ļ¼┤ĻČüļ¼┤ņ¦äĒĢ£ ņ×Āņ×¼ļĀźņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŗż. ĒĢśņ¦Ćļ¦ī ņØ┤ļ¤¼ĒĢ£ ņ×Āņ×¼ņä▒Ļ│╝ ĒĢ©Ļ╗ś ļé«ņØĆ ņČ£ļĀź, relaxationĻ│╝ Ļ░ÖņØĆ ļ¼ĖņĀ£ņĀÉņØä ļÅÖņŗ£ņŚÉ Ļ░Ćņ¦ĆĻ│Ā ņ׳ĻĖ░ņŚÉ ņŚ¼ņĀäĒ׳ ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖżņŚÉ ņé¼ņÜ®ļÉĀ ņłś ņ׳ļŖö ļČĆļČäņØĆ ņĀ£ĒĢ£ļÉśĻ│Ā ņ׳ļŗż.
ņØ┤ļ¤¼ĒĢ£ ļ¼ĖņĀ£ņĀÉņØä ĒĢ┤Ļ▓░ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ IPMC ņżĆļ╣ä ļŗ©Ļ│äņŚÉņä£ ņĀäņ▓śļ”¼Ļ░Ć ņŚ░ĻĄ¼ļÉśĻ│Ā ņ׳ļŗż. ņĄ£ĻĘ╝ņŚÉļŖö ņé¼Ēżņ▓śļ”¼, ĒÖöĒĢÖ ļČĆņŗØ, ĒöīļØ╝ņ”łļ¦ł ņŗØĻ░ü, ņāīļō£ ļĖöļלņŖżĒīģ ļō▒Ļ│╝ Ļ░ÖņØĆ ļ░®ļ▓ĢņØ┤ ļČĆĻ░üļÉśĻ│Ā ņ׳ļŗż. ņé¼Ēżļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ Ēæ£ļ®┤ Ļ▒░ņ╣ĀĻĖ░ļź╝ ņ”ØĻ░Ćņŗ£ĒéżļŖö ļ░®ņŗØņØĆ ņØĖņĀü ņÜöņåīĻ░Ć Ļ░£ņ×ģļÉśņ¢┤ ļČłĻĘĀņØ╝ĒĢ£ Ēæ£ļ®┤ņØ┤ ĒśĢņä▒ļÉĀ ņłś ņ׳ļŗż. ĒÖöĒĢÖļČĆņŗØņØ┤ļéś ĒöīļØ╝ņ”łļ¦ł ņŗØĻ░üņØś Ļ▓ĮņÜ░ņŚÉļŖö ĻĘĀņØ╝ĒĢ£ Ēæ£ļ®┤ņØä ņ¢╗ņØä ņłś ņ׳ņ¦Ćļ¦ī ļČäļ”¼ļ¦ē Ēæ£ļ®┤ņØś ļČäņ×ÉĻĄ¼ņĪ░Ļ░Ć ņēĮĻ▓ī ļ│Ćņ¦łļÉĀ ņłś ņ׳ļŗżļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż. ņāīļō£ ļĖöļלņŖżĒīģņØä ņØ┤ņÜ®ĒĢ£ ļ░®ļ▓Ģ ļśÉĒĢ£ ĻĘĀņØ╝ĒĢ£ Ēæ£ļ®┤ņØä ņ¢╗ļŖö Ļ▓āņØĆ ĒלļōżļŗżļŖö ļŗ©ņĀÉņØ┤ ņ׳ļŗż. ĻĘĖļ¤¼ļ»ĆļĪ£ ĻĘĀņØ╝ĒĢśļ®┤ņä£ļÅä Ļ▒░ņ╣£ Nafion Ēæ£ļ®┤ņØä ņ¢╗ĻĖ░ ņ£äĒĢ£ ņāłļĪ£ņÜ┤ ļ░®ļ▓ĢņØ┤ ĒĢäņÜöĒĢśļŗż.
RelaxationņØä ņĀ£Ļ▒░ĒĢśĻĖ░ ņ£äĒĢ£ ĻĖ░ņĪ┤ņØś ļ░®ļ▓ĢļōżļÅä ņŚ¼ņĀäĒ׳ ļŗ©ņĀÉņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŗż. ņØ┤ņś©ņä▒ ņĢĪņ▓┤ļĪ£ ņÜ®ļ¦żļź╝ ļīĆņ▓┤ĒĢśļŖö ļ░®ļ▓ĢņØ┤ relaxation ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢĀ ņłś ņ׳ĻĖ░ļŖö ĒĢśņ¦Ćļ¦ī ļ░śļīĆ ĻĖēļČĆļĪ£ ļ░śņØæ ņŗ£Ļ░äņØ┤ ļŖÉļĀżņ¦äļŗż. ļŗżļźĖ ļ░®ļ▓ĢņØĖ ļČäļ”¼ļ¦ēņØś ņłśļČäĒĢ©ļ¤ēņØä ņĪ░ņĀłĒĢśļŖö ļ░®ņŗØņØ┤ ņØ┤ ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻĖ░ ņ£äĒĢ£ ņóŗņØĆ ļ░®ļ▓ĢņØ┤ņ¦Ćļ¦ī ļ»Ėļ¤ēņØś ņłśļČäĒĢ©ļ¤ē ņ░©ņØ┤Ļ░Ć ļäłļ¼┤ Ēü░ ņ░©ņØ┤ļź╝ ļČłļ¤¼ņØ╝ņ£╝ĒéżĻĖ░ ļĢīļ¼ĖņŚÉ ņĄ£ņĀüņØś ļ░®ļ▓ĢņØ┤ļØ╝Ļ│Ā ļ│╝ ņłśļŖö ņŚåņØä Ļ▓āņØ┤ļŗż. ļśÉĒĢ£ ņłśļČäĒĢ©ļ¤ēņØä ņØ╝ņĀĢĒĢśĻ▓ī ņ£Āņ¦ĆĒĢśĻĖ░ ņ£äĒĢ┤ņä£ IPMCņ×Éņ▓┤ļź╝ ļ┤ēņ¦ĆĒĢśļŖö Ļ│╝ņĀĢņØ┤ ĒĢäņÜöĒĢśĻĖ░ ļĢīļ¼ĖņŚÉ ņŚŁņŗ£ ļŗżņ¢æĒĢ£ ņ¢┤ļĀżņøĆņØ┤ ņĪ┤ņ×¼ĒĢ£ļŗż. ĻĘĖļ”¼Ļ│Ā relaxation ļ¼ĖņĀ£ļź╝ ĒĢ┤Ļ▓░ĒĢśĻĖ░ ņ£äĒĢ┤ņä£ ņłśļČäĒĢ©ļ¤ēņØä ņżäņØ┤ļŖö Ļ▓āņØĆ ņØ┤ņś©ņä▒ ņĢĪņ▓┤ļĪ£ ļīĆņ▓┤ĒĢśļŖö Ļ▓āĻ│╝ ļ¦łņ░¼Ļ░Ćņ¦ĆļĪ£ ļ░śņØæ ņåŹļÅäņØś Ļ░Éņåīļź╝ Ļ░ĆņĀĖņś©ļŗż. ļö░ļØ╝ņä£ relaxationņØä Ļ░Éņåīņŗ£ĒéżļŖö Ļ▓āĻ│╝ ļÅÖņŗ£ņŚÉ ņä▒ļŖźņØä ĻĘ╣ļīĆĒÖöĒĢśļŖö Ļ▓āņØ┤ ļ░śļō£ņŗ£ ĒĢäņÜöĒĢśļŗż.
IPMCņØś ņä▒ļŖźņØä ļüīņ¢┤ņś¼ļ”¼ĻĖ░ ņ£äĒĢ£ Ļ░Ćņן Ļ░äļŗ©ĒĢ£ ļ░®ļ▓ĢņØĆ ņĢäļ¼┤ļלļÅä IPMCņØś ļæÉĻ╗śļź╝ ļŖśļ”¼ļŖö ļ░®ņŗØņØ┤ļŗż. ļæÉĻ╗śļź╝ ļŖśļ”¼ļŖö ļ░®ņŗØņØĆ Ēü¼Ļ▓ī ļæÉ Ļ░Ćņ¦ĆļĪ£ ļéśļēśļŖöļŹ░, ņ▓½ ļ▓łņ¦ĖļŖö ņŚ¼ļ¤¼ Ļ░£ņØś ļČäļ”¼ļ¦ēņØä Ļ░ĆņŚ┤ ņĢĢņ░®ņØä ĒåĄĒĢ┤ ĒĢśļéśņØś ļČäļ”¼ļ¦ēņ£╝ļĪ£ ļ¦īļō£ļŖö ļ░®ņŗØņØ┤ ņ׳Ļ│Ā, ļæÉ ļ▓łņ¦ĖļŖö ņÜ®ņĢĪ Ļ│ĄņĀĢņØä ĒåĄĒĢ┤ ņĀ£ņ×æĒĢśļŖö Ļ▓āņØ┤ļŗż. ļæÉ ļ░®ņŗØ ļ¬©ļæÉ ļŗ©ņĀÉņØä Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖöļŹ░ Ļ░ĆņŚ┤ ņĢĢņ░® Ļ│ĄņĀĢņØś Ļ▓ĮņÜ░ ņןĻĖ░Ļ░ä ņé¼ņÜ®ĒĢĀ Ļ▓ĮņÜ░ ļŗ©ņØ╝ ļČäļ”¼ļ¦ē Ļ│äļ®┤ņŚÉņä£ ĒāłļØĮņØ┤ ņØ╝ņ¢┤ļéĀ Ļ░ĆļŖźņä▒ņØ┤ Ēü¼ļŗżļŖö Ļ▓āņØ┤Ļ│Ā, ņÜ®ņĢĪ Ļ│ĄņĀĢņØś Ļ▓ĮņÜ░ņŚÉļŖö ļ│ĆĒśĢņØ┤ Ļ░ÉņåīĒĢśĻ│Ā ņØæļŗĄņŗ£Ļ░äņØ┤ ņżäņ¢┤ļōĀļŗżļŖö Ļ▓āņØ┤ļŗż. Zhu et. alņØĆ IPMCņØś ņØæļŗĄ ņåŹļÅäļź╝ ņ”ØĻ░Ćņŗ£ĒéżĻĖ░ ņ£äĒĢ┤ņä£ Ļ│ĀņĀäņĢĢ ĒÄäņŖżļź╝ Ļ░ĆĒĢśļŖö ļ░®ņŗØņØä ņĀ£ņĢłĒĢśņśĆļŖöļŹ░ ņ┤łĻĖ░ņŚÉ ļ│ĆĒśĢņØ┤ ņל ņØ╝ņ¢┤ļéśņ¦Ć ņĢŖļŖö ņĀÉņØä Ļ│ĀļĀżĒĢśņŚ¼ ļæÉĻ║╝ņÜ┤ IPMC ņŚÉņä£ ļ│ĆĒśĢņØ┤ ņØ╝ņ¢┤ļéśņ¦Ć ņĢŖļŖö ņĀÉņØä ĒĢ┤Ļ▓░ĒĢśņśĆļŗż.57)
Ļ▓░ļĪĀņĀüņ£╝ļĪ£ ņ£ä ĒĢ┤Ļ▓░ļ░®ņĢłļōżņØä ĒåĄĒĢ┤ IPMCĻ░Ć Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖö ļ¬©ļōĀ ļ¼ĖņĀ£ņĀÉļōżņØä ņÖäļ▓ĮĒĢśĻ▓ī ĒĢ┤Ļ▓░ĒĢĀ ņłśļŖö ņŚåļŗż. ĒĢśņ¦Ćļ¦ī IPMCĻ░Ć Ļ░Ćņ¦ĆĻ│Ā ņ׳ļŖö ņŚ¼ļ¤¼ ņןņĀÉļōżņØä ņ£Āņ¦ĆĒĢśļ®░ ļŗ©ņĀÉņØä ļ│┤ņÖäĒĢĀ ņłś ņ׳ļŖö ņŚ░ĻĄ¼ļōżņØ┤ ĻŠĖņżĆĒ׳ ņ¦äĒ¢ēļÉ£ļŗżļ®┤, ņåīĒöäĒŖĖ ļĪ£ļ│┤Ēŗ▒ņŖż ļČäņĢ╝ņŚÉ ņé¼ņÜ®ļÉśļŖö ņĢĪņČöņŚÉņØ┤Ēä░ņÖĆ ņä╝ņä£ļĪ£ņŹ©ņØś ņé¼ņÜ®ņØ┤ ļ©Ėņ¦ĆņĢŖņØĆ ļ»ĖļלņŚÉ Ļ░ĆļŖźĒĢĀ Ļ▓āņØ┤ļŗż.









